Archive for 2013
 Cocok ditaruh dimobil, dekat komputer, sehingga anda akan lebih nyaman dan stay lebih lama.
Kulkas mini yang didesign khusus untuk bro & sist yg hobi nongkrong didepan laptop/komputer.
Dengan fungsi Panas / Dingin, sehingga bisa digunakan untuk anda yang gemar minuman dingin agar minuman tetap dingin.
Ataupun untuk pengemar minuman panas seperti kopi dan teh hangat dalam menjaga minumannya tetap hangat.
Dengan colokkan usb sehingga praktis tinggal dicolok ke port usb laptop/computer ketika sedang bekerja.
Ukuran hanya untuk satu kaleng soft drink.
SPESIFIKASI :
- Mendinginkan ataupun menghangatkan minuman.
- Desainnya menarik bisa juga untuk dipajang pada meja komputer anda sebagai penghias.
- Dimensi : 19.5 x 9 x 8 cm.
- Power USB (tidak diperlukan baterai tambahan).
- Bisa pake adapter/car adapter jadi bisa colokin di colokan listrik biasa atau bisa dalam mobil [ tidak termasuk adaptor mobil kit ].
* Adapter/car adapter dapat dibeli di toko alat2 listik/aksesoris mobil, harga 10ribuan.
- Tombol pengatur Suhu, bisa diatur antara dingin atau hangat (12.5 – 47 derajat celcius).
- 5 menit untuk mencapai titik dingin / panas maksimum.
- Plug & Play.
- Memuat 1 kaleng minuman, minuman gelas, minuman kotak, botol beling, botol susu, botol plastik, gelas minum, cemilan, buah.
- Box lengkap dengan penyangga & plastik gelembung jadi tetap aman sampai di tangan customer.
- Panduan.
Cocok ditaruh dimobil, dekat komputer, sehingga anda akan lebih nyaman dan stay lebih lama.
Kulkas mini yang didesign khusus untuk bro & sist yg hobi nongkrong didepan laptop/komputer.
Dengan fungsi Panas / Dingin, sehingga bisa digunakan untuk anda yang gemar minuman dingin agar minuman tetap dingin.
Ataupun untuk pengemar minuman panas seperti kopi dan teh hangat dalam menjaga minumannya tetap hangat.
Dengan colokkan usb sehingga praktis tinggal dicolok ke port usb laptop/computer ketika sedang bekerja.
Ukuran hanya untuk satu kaleng soft drink.
SPESIFIKASI :
- Mendinginkan ataupun menghangatkan minuman.
- Desainnya menarik bisa juga untuk dipajang pada meja komputer anda sebagai penghias.
- Dimensi : 19.5 x 9 x 8 cm.
- Power USB (tidak diperlukan baterai tambahan).
- Bisa pake adapter/car adapter jadi bisa colokin di colokan listrik biasa atau bisa dalam mobil [ tidak termasuk adaptor mobil kit ].
* Adapter/car adapter dapat dibeli di toko alat2 listik/aksesoris mobil, harga 10ribuan.
- Tombol pengatur Suhu, bisa diatur antara dingin atau hangat (12.5 – 47 derajat celcius).
- 5 menit untuk mencapai titik dingin / panas maksimum.
- Plug & Play.
- Memuat 1 kaleng minuman, minuman gelas, minuman kotak, botol beling, botol susu, botol plastik, gelas minum, cemilan, buah.
- Box lengkap dengan penyangga & plastik gelembung jadi tetap aman sampai di tangan customer.
- Panduan.AC PHASE CONTROL DIMMER LAMP
 Pada rangkaian dimmer ini, tegangan AC 220 volt diubah oleh transformator menjadi tegangan DC 12 volt. Pengubahan tegangan dilakukan melalui penyearah diode. Dan dari rangkaian di atas terlihat bahwa terdapat dua penyearah dida yang digunakan, hal ini ditujukan karena penyearah yang pertama berfungsi untuk supplay tegangan DC 12 volt yang yang juga terdapat filter untuk mengurangi ripple tegangan outputnya, sedangkan penyearah yang kedua yaitu penyearah tanpa filter yang sebagai inputan untuk mendeteksi zero cross detector. Penggunaan 2 potensiometer di atas ditujukan, yang pertama adalah potensio yang terhubung dengan LM339 yang berfungsi sebagai pembanding agar nyala lampu bisa dibandingkan atau bisa juga dikatakan sebagai pengatur nyala lampu. Sedangkan potensio yang kedua adalah yang terhubung dengan IC NE555 yang berfungsi untuk pengaturan delay. Penggunaan MOC3041 digunakan untuk isolasi dari tegangan rendah ke tinggi berdasarkan cahaya. Pada rangkaian dimmer yang kami buat, kami menggunakan IC LM339 sebagai ZCD-nya, sedangkan ada berbagai elternatif komponen untuk merangkai ZCD, misalnya transistor. Sebenarnya prinsipnya sama yaitu sebagai ZCD untuk membaca sudut picu yang dimulai dari 00, perbedaannya adalah dari cara kerjanya. IC LM339 menggunakan prinsip komparator, sedangkan transistor menggunakan prinsip sebagai saklar.
Namun, dari project yang kami buat ini belum berhasil sebab terdapat beberapa kesalahan pada penggunaan dan perangkaian komponen, yaitu salah satunya adalah komponen IC LM339 dimana letak kesalahannya adalah hanya menampilkan output gelombang DC lurus saja yang seharusnya berbentuk gelombang sinus dan apabila potensio diputar, maka yang terjadi adalah gelombang DC naik turun, jadi yang bertambah justru tegangannya. Selain itu juga terjadi kesalahan pada perangkaian kaki dari MOC3041, yang seharusnya kaki 4 terhubung dengan gate dar TRIAC, tapi justru kaki 6 yang terhubung dengan TRIAC, jadi beberapa hal tersebutlah yang membuat lampu hanya bis menyala dan tidak dapat dipicu.
Pada rangkaian dimmer ini, tegangan AC 220 volt diubah oleh transformator menjadi tegangan DC 12 volt. Pengubahan tegangan dilakukan melalui penyearah diode. Dan dari rangkaian di atas terlihat bahwa terdapat dua penyearah dida yang digunakan, hal ini ditujukan karena penyearah yang pertama berfungsi untuk supplay tegangan DC 12 volt yang yang juga terdapat filter untuk mengurangi ripple tegangan outputnya, sedangkan penyearah yang kedua yaitu penyearah tanpa filter yang sebagai inputan untuk mendeteksi zero cross detector. Penggunaan 2 potensiometer di atas ditujukan, yang pertama adalah potensio yang terhubung dengan LM339 yang berfungsi sebagai pembanding agar nyala lampu bisa dibandingkan atau bisa juga dikatakan sebagai pengatur nyala lampu. Sedangkan potensio yang kedua adalah yang terhubung dengan IC NE555 yang berfungsi untuk pengaturan delay. Penggunaan MOC3041 digunakan untuk isolasi dari tegangan rendah ke tinggi berdasarkan cahaya. Pada rangkaian dimmer yang kami buat, kami menggunakan IC LM339 sebagai ZCD-nya, sedangkan ada berbagai elternatif komponen untuk merangkai ZCD, misalnya transistor. Sebenarnya prinsipnya sama yaitu sebagai ZCD untuk membaca sudut picu yang dimulai dari 00, perbedaannya adalah dari cara kerjanya. IC LM339 menggunakan prinsip komparator, sedangkan transistor menggunakan prinsip sebagai saklar.
Namun, dari project yang kami buat ini belum berhasil sebab terdapat beberapa kesalahan pada penggunaan dan perangkaian komponen, yaitu salah satunya adalah komponen IC LM339 dimana letak kesalahannya adalah hanya menampilkan output gelombang DC lurus saja yang seharusnya berbentuk gelombang sinus dan apabila potensio diputar, maka yang terjadi adalah gelombang DC naik turun, jadi yang bertambah justru tegangannya. Selain itu juga terjadi kesalahan pada perangkaian kaki dari MOC3041, yang seharusnya kaki 4 terhubung dengan gate dar TRIAC, tapi justru kaki 6 yang terhubung dengan TRIAC, jadi beberapa hal tersebutlah yang membuat lampu hanya bis menyala dan tidak dapat dipicu.



Mikrokontroller Atmega 8535
Mikrokontroler merupakan sebuah sistem komputer yang seluruh atau sebagian besar elemennya dikemas dalam satu chip IC, sehingga sering disebut
single chip microcomputer. Lebih lanjut, mikrokontroler merupakan sistem komputer yang mempunyai satu atau beberapa tugas yang sangat spesifik, berbeda dangan PC (Personal Computer) yang memiliki beragam fungsi. Perbedaan lainnya adalah perbandingan RAM dan ROM yang sangat berbeda antara komputer dengan mikrokontroler.
Mikrokontroler adalah sebuah system microprocessor dimana didalamnya sudah terdapat CPU, ROM, RAM, I/O, Clock dan peralatan internal lainnya yang sudah saling terhubung dan terorganisasi (teralamati) dengan baik oleh pabrik pembuatnya dan dikemas dalam satuchip yang siap pakai. Sehingga kita tinggal memprogram isi ROM sesuai aturan penggunaan oleh pabrik yang membuatnya menurut Winoto (2008:3).
Teknologi yang digunakan pada mikrokontroler AVR berbeda dengan mikrokontroler seri MCS-51. AVR berteknologi RISC (Reduced Instruction Set Computer), sedangkan seri MCS-51 berteknologi CISC (Complex Instruction Set Computer). Mikrokontroler AVR dapat dikelompokkan menjadi empat kelas, yaitu keluarga ATtiny, keluarga AT90Sxx, keluarga ATMega, dan keluarga AT89RFxx. Pada dasarnya yang membedakan masing-masing kelas adalah memori, kelengkapan periperal dan fungsi-fungsi tambahan yang dimiliki. Berikut ini penjelasan lebih lengkap mengenai Mikrokontroler ATMega8535:
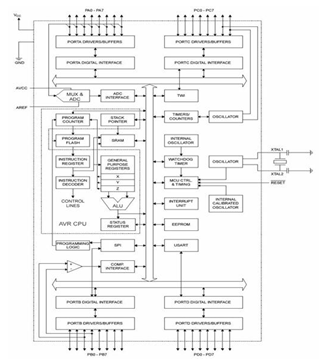
 Diagram pinmikrokontroler dapat dilihat pada gambar berikut:
Diagram pinmikrokontroler dapat dilihat pada gambar berikut:
 Berikut ini adalah tabel penjelasan mengenai pin yang terdapat pada
mikrokontroler ATMega8535:
Tabel Penjelasan pin pada mikrokontroler ATMega8535
Berikut ini adalah tabel penjelasan mengenai pin yang terdapat pada
mikrokontroler ATMega8535:
Tabel Penjelasan pin pada mikrokontroler ATMega8535
 Berikut ini adalah penjelasan dari pin mikrokontroler ATMega8535 menurut port-nya masing-masing:
1. PORTA
Pin33 sampai dengan pin 40 merupakan pin dari port A. Merupakan 8 bit directional port I/O. Setiap pin-nya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer port A dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port A (DDRA) harus di-setting terlebih dahulu sebelum port A digunakan. Bit-bit DDRA diisi 0 jika ingin memfungsikan pin-pin port A yang disesuaikan sebagai input, atau diisi 1 jika sebagai output. Selain itu, pin-pin pada port A juga memiliki fungsi-fungsi alternatif khusus seperti yang dapat dilihat dalam tabel:
Tabel Penjelasan pin pada port A
Berikut ini adalah penjelasan dari pin mikrokontroler ATMega8535 menurut port-nya masing-masing:
1. PORTA
Pin33 sampai dengan pin 40 merupakan pin dari port A. Merupakan 8 bit directional port I/O. Setiap pin-nya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer port A dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port A (DDRA) harus di-setting terlebih dahulu sebelum port A digunakan. Bit-bit DDRA diisi 0 jika ingin memfungsikan pin-pin port A yang disesuaikan sebagai input, atau diisi 1 jika sebagai output. Selain itu, pin-pin pada port A juga memiliki fungsi-fungsi alternatif khusus seperti yang dapat dilihat dalam tabel:
Tabel Penjelasan pin pada port A
 2. PORTB
Pin 1 sampai dengan pin 8 merupakan pin dari port B. Merupakan 8 bit directional port I/O. Setiappin-nya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer port B dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port B (DDRB) harus di-setting terlebih dahulu sebelum port B digunakan. Bit-bit DDRB diisi 0 jika ingin memfungsikan pin-pin port B yang disesuaikan sebagai input, atau diisi 1 jika sebagai output. Selain itu, pin-pin port B juga memiliki fungsi-fungsi alternatif khusus seperti yang dapat dilihat dalam tabel:
Tabel Penjelasan pin pada port B
2. PORTB
Pin 1 sampai dengan pin 8 merupakan pin dari port B. Merupakan 8 bit directional port I/O. Setiappin-nya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer port B dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port B (DDRB) harus di-setting terlebih dahulu sebelum port B digunakan. Bit-bit DDRB diisi 0 jika ingin memfungsikan pin-pin port B yang disesuaikan sebagai input, atau diisi 1 jika sebagai output. Selain itu, pin-pin port B juga memiliki fungsi-fungsi alternatif khusus seperti yang dapat dilihat dalam tabel:
Tabel Penjelasan pin pada port B
 3. PORTC
Pin 22 sampai dengan pin 29 merupakan pin dari port C. Port C sendiri merupakan port input atauoutput. Setiap pin-nya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer port C dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung.Data Direction Register port C (DDRC) harus di-setting terlebih dahulu sebelum port C digunakan.Bit-bit DDRC diisi 0 jika ingin memfungsikan pin-pin port C yang disesuaikan sebagai input, atau diisi 1 jika sebagai output. Selain itu, pin-pin port D juga memiliki fungsi-fungsi alternatif khusus seperti yang dapat dilihat dalam tabel.
Tabel Penjelasan pin pada port C
3. PORTC
Pin 22 sampai dengan pin 29 merupakan pin dari port C. Port C sendiri merupakan port input atauoutput. Setiap pin-nya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer port C dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung.Data Direction Register port C (DDRC) harus di-setting terlebih dahulu sebelum port C digunakan.Bit-bit DDRC diisi 0 jika ingin memfungsikan pin-pin port C yang disesuaikan sebagai input, atau diisi 1 jika sebagai output. Selain itu, pin-pin port D juga memiliki fungsi-fungsi alternatif khusus seperti yang dapat dilihat dalam tabel.
Tabel Penjelasan pin pada port C
 4. PORTD
Pin 14 sampai dengan pin 20 merupakan pin dari port D. Merupakan 8 bit directional port I/O. Setiap pin-nya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer port D dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port D (DDRD) harus di-setting terlebih dahulu sebelum port D digunakan. Bit-bit DDRD diisi 0 jika ingin memfungsikan pin-pin port D yang disesuaikan sebagai input, atau diisi 1 jika sebagai output. Selain itu, pin-pin port D juga memiliki fungsi-fungsi alternatif khusus seperti yang dapat dilihat dalam tabel:
Tabel Penjelasan pin pada port D
4. PORTD
Pin 14 sampai dengan pin 20 merupakan pin dari port D. Merupakan 8 bit directional port I/O. Setiap pin-nya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer port D dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port D (DDRD) harus di-setting terlebih dahulu sebelum port D digunakan. Bit-bit DDRD diisi 0 jika ingin memfungsikan pin-pin port D yang disesuaikan sebagai input, atau diisi 1 jika sebagai output. Selain itu, pin-pin port D juga memiliki fungsi-fungsi alternatif khusus seperti yang dapat dilihat dalam tabel:
Tabel Penjelasan pin pada port D
 C. Diagram blok ATmega8535
Pada diagram blok ATMega8535 digambarkan 32 general purpose Working register yang dihubungkan secara langsung dengan Arithmetic Logic Unit (ALU). Sehingga memungkinkan duaregister yang berbeda dapat diakses dalam satu siklus clock.
C. Diagram blok ATmega8535
Pada diagram blok ATMega8535 digambarkan 32 general purpose Working register yang dihubungkan secara langsung dengan Arithmetic Logic Unit (ALU). Sehingga memungkinkan duaregister yang berbeda dapat diakses dalam satu siklus clock.

 Diagram pinmikrokontroler dapat dilihat pada gambar berikut:
Diagram pinmikrokontroler dapat dilihat pada gambar berikut:
 Berikut ini adalah tabel penjelasan mengenai pin yang terdapat pada
mikrokontroler ATMega8535:
Tabel Penjelasan pin pada mikrokontroler ATMega8535
Berikut ini adalah tabel penjelasan mengenai pin yang terdapat pada
mikrokontroler ATMega8535:
Tabel Penjelasan pin pada mikrokontroler ATMega8535
 Berikut ini adalah penjelasan dari pin mikrokontroler ATMega8535 menurut port-nya masing-masing:
1. PORTA
Pin33 sampai dengan pin 40 merupakan pin dari port A. Merupakan 8 bit directional port I/O. Setiap pin-nya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer port A dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port A (DDRA) harus di-setting terlebih dahulu sebelum port A digunakan. Bit-bit DDRA diisi 0 jika ingin memfungsikan pin-pin port A yang disesuaikan sebagai input, atau diisi 1 jika sebagai output. Selain itu, pin-pin pada port A juga memiliki fungsi-fungsi alternatif khusus seperti yang dapat dilihat dalam tabel:
Tabel Penjelasan pin pada port A
Berikut ini adalah penjelasan dari pin mikrokontroler ATMega8535 menurut port-nya masing-masing:
1. PORTA
Pin33 sampai dengan pin 40 merupakan pin dari port A. Merupakan 8 bit directional port I/O. Setiap pin-nya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer port A dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port A (DDRA) harus di-setting terlebih dahulu sebelum port A digunakan. Bit-bit DDRA diisi 0 jika ingin memfungsikan pin-pin port A yang disesuaikan sebagai input, atau diisi 1 jika sebagai output. Selain itu, pin-pin pada port A juga memiliki fungsi-fungsi alternatif khusus seperti yang dapat dilihat dalam tabel:
Tabel Penjelasan pin pada port A
 2. PORTB
Pin 1 sampai dengan pin 8 merupakan pin dari port B. Merupakan 8 bit directional port I/O. Setiappin-nya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer port B dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port B (DDRB) harus di-setting terlebih dahulu sebelum port B digunakan. Bit-bit DDRB diisi 0 jika ingin memfungsikan pin-pin port B yang disesuaikan sebagai input, atau diisi 1 jika sebagai output. Selain itu, pin-pin port B juga memiliki fungsi-fungsi alternatif khusus seperti yang dapat dilihat dalam tabel:
Tabel Penjelasan pin pada port B
2. PORTB
Pin 1 sampai dengan pin 8 merupakan pin dari port B. Merupakan 8 bit directional port I/O. Setiappin-nya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer port B dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port B (DDRB) harus di-setting terlebih dahulu sebelum port B digunakan. Bit-bit DDRB diisi 0 jika ingin memfungsikan pin-pin port B yang disesuaikan sebagai input, atau diisi 1 jika sebagai output. Selain itu, pin-pin port B juga memiliki fungsi-fungsi alternatif khusus seperti yang dapat dilihat dalam tabel:
Tabel Penjelasan pin pada port B
 3. PORTC
Pin 22 sampai dengan pin 29 merupakan pin dari port C. Port C sendiri merupakan port input atauoutput. Setiap pin-nya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer port C dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung.Data Direction Register port C (DDRC) harus di-setting terlebih dahulu sebelum port C digunakan.Bit-bit DDRC diisi 0 jika ingin memfungsikan pin-pin port C yang disesuaikan sebagai input, atau diisi 1 jika sebagai output. Selain itu, pin-pin port D juga memiliki fungsi-fungsi alternatif khusus seperti yang dapat dilihat dalam tabel.
Tabel Penjelasan pin pada port C
3. PORTC
Pin 22 sampai dengan pin 29 merupakan pin dari port C. Port C sendiri merupakan port input atauoutput. Setiap pin-nya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer port C dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung.Data Direction Register port C (DDRC) harus di-setting terlebih dahulu sebelum port C digunakan.Bit-bit DDRC diisi 0 jika ingin memfungsikan pin-pin port C yang disesuaikan sebagai input, atau diisi 1 jika sebagai output. Selain itu, pin-pin port D juga memiliki fungsi-fungsi alternatif khusus seperti yang dapat dilihat dalam tabel.
Tabel Penjelasan pin pada port C
 4. PORTD
Pin 14 sampai dengan pin 20 merupakan pin dari port D. Merupakan 8 bit directional port I/O. Setiap pin-nya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer port D dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port D (DDRD) harus di-setting terlebih dahulu sebelum port D digunakan. Bit-bit DDRD diisi 0 jika ingin memfungsikan pin-pin port D yang disesuaikan sebagai input, atau diisi 1 jika sebagai output. Selain itu, pin-pin port D juga memiliki fungsi-fungsi alternatif khusus seperti yang dapat dilihat dalam tabel:
Tabel Penjelasan pin pada port D
4. PORTD
Pin 14 sampai dengan pin 20 merupakan pin dari port D. Merupakan 8 bit directional port I/O. Setiap pin-nya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer port D dapat memberi arus 20 mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port D (DDRD) harus di-setting terlebih dahulu sebelum port D digunakan. Bit-bit DDRD diisi 0 jika ingin memfungsikan pin-pin port D yang disesuaikan sebagai input, atau diisi 1 jika sebagai output. Selain itu, pin-pin port D juga memiliki fungsi-fungsi alternatif khusus seperti yang dapat dilihat dalam tabel:
Tabel Penjelasan pin pada port D
 C. Diagram blok ATmega8535
Pada diagram blok ATMega8535 digambarkan 32 general purpose Working register yang dihubungkan secara langsung dengan Arithmetic Logic Unit (ALU). Sehingga memungkinkan duaregister yang berbeda dapat diakses dalam satu siklus clock.
C. Diagram blok ATmega8535
Pada diagram blok ATMega8535 digambarkan 32 general purpose Working register yang dihubungkan secara langsung dengan Arithmetic Logic Unit (ALU). Sehingga memungkinkan duaregister yang berbeda dapat diakses dalam satu siklus clock.
Robot ERSION PENS Juarai Regional 4 KRI 2013
27 Apr 2013 22:56:06| Pendidikan/Pesantren | Penulis : Edy M Yakub
 Surabaya (Antara Jatim) - Tim robot "ERSION" dari Politeknik Elektronika Negeri Surabaya (PENS) akhirnya menjuarai Kontes Robot Indonesia (KRI) 2013 Regional IV di GOR Bima Universitas Negeri Surabaya, Sabtu malam.
"Prestasi itu diraih Tim PENS setelah mampu mengalahkan tim robot 'RI-Vet' dari ITS saat bertemu dalam babak final KRI 2013. Sebelumnya, mereka mengikuti babak semifinal bersama Miracle SWC-8, dan New Rengganis," kata Kepala Humas PENS Andri Suryandari.
Pertandingan semifinal pertama antara RI-Vet asal ITS melawan Miracle SWC-8 asal STMIK Surabaya membawa sukses tim RI-Vet dengan pencapaian Green Planet, namun tim dari STMIK Surabaya tidak kecewa, karena ketujuh "leaves" mampu menempati "hole" secara tepat.
Dalam pertandingan semifinal kedua antara New Rengganis dari Unesa dengan ERSION dari PENS juga mengundang antusiasme penonton, karena unjuk kebolehan ERSION dalam "duet spesial" antara robot manual dan automatic mencapai "The Green Planet" sebelum waktu selesai.
Hasil itu menandai "All Final's ITS" terulang untuk ke sekian kalinya pada Final KRI Regional IV dengan keunggulan PENS atas ITS secara "green planet", sedangkan juara ketiga diraih tim Miracle-SWC 08 dari STIMIK Surabaya.
Untuk juara ke 1, 2 dan 3 akan mewakili KRI Regional IV untuk melaju ke tingkat nasional di Semarang. Mereka menjuarai KRI yang diikuti 68 tim dari 25 perguruan tinggi negeri dan swasta se-Jawa Timur.
Lima jenis kompetisi dalam KRI 2013 adalah KRI, Kontes Robot Pemadam Api Indonesia (KRPAI, divisi robot beroda dan robot berkaki), Kontes Robot Seni Indonesia (KRSI), dan Kontes Robot Sepak Bola Indonesia (KRSBI) atau Humanoid.
Tahun ini, PENS mengikuti semua divisi dengan menurunkan lima tim robotnya, yakni ERSION, EILERO, EFFIRO, EROS, dan ERISA. Seleksi KRPAI divisi beroda menyaring tiga wakil dari Regional 4 yaitu Arus (Universitas Dr. Soetomo), EFFIRO (PENS), dan Al-Jazari (ITS).
Di divisi berkaki, dipilihlah EILERO (PENS) di peringkat pertama, lalu Ulil Albab (Polinema) dan terakhir Child13Sh (Unmuh Malang).
Untuk divisi berkaki, skor ditentukan melalui jarak tempuh dan banyak ruangan yang dilaluinya. Poin tambahan akan diperoleh jika robot mampu memadamkan api.
Pada divisi KRSI, enam robot berlenggok menarikan tarian Hanoman Duta. Robot V-Nara, IBRAHIMI, eSPe'04, SUGRIWA, KETEUS, dan ERISA. Akhirnya, terpilihlah ERISA, V-Nara dan eSPe'04 di peringkat 1-3 yang berlaga di KRI Nasional.
Untuk final KRSBI, EROS (PENS) bertemu dengan Ichiro (ITS). Dalam pertandingan yang terbagi dalam dua babak ini, EROS berhasil memenangkan pertandingan dengan skor 10-0.
Hingga kini, seleksi telah terlaksana di 2 regional, yaitu regional 1 (Sumatera) dan regional 4 (Jawa Timur). Masih ada tiga seleksi lagi yakni seleksi regional 2 (Jakarta dan Jabar), regional 3 (Jawa Tengah) dan regional 5 (Indonesia Timur).
Surabaya (Antara Jatim) - Tim robot "ERSION" dari Politeknik Elektronika Negeri Surabaya (PENS) akhirnya menjuarai Kontes Robot Indonesia (KRI) 2013 Regional IV di GOR Bima Universitas Negeri Surabaya, Sabtu malam.
"Prestasi itu diraih Tim PENS setelah mampu mengalahkan tim robot 'RI-Vet' dari ITS saat bertemu dalam babak final KRI 2013. Sebelumnya, mereka mengikuti babak semifinal bersama Miracle SWC-8, dan New Rengganis," kata Kepala Humas PENS Andri Suryandari.
Pertandingan semifinal pertama antara RI-Vet asal ITS melawan Miracle SWC-8 asal STMIK Surabaya membawa sukses tim RI-Vet dengan pencapaian Green Planet, namun tim dari STMIK Surabaya tidak kecewa, karena ketujuh "leaves" mampu menempati "hole" secara tepat.
Dalam pertandingan semifinal kedua antara New Rengganis dari Unesa dengan ERSION dari PENS juga mengundang antusiasme penonton, karena unjuk kebolehan ERSION dalam "duet spesial" antara robot manual dan automatic mencapai "The Green Planet" sebelum waktu selesai.
Hasil itu menandai "All Final's ITS" terulang untuk ke sekian kalinya pada Final KRI Regional IV dengan keunggulan PENS atas ITS secara "green planet", sedangkan juara ketiga diraih tim Miracle-SWC 08 dari STIMIK Surabaya.
Untuk juara ke 1, 2 dan 3 akan mewakili KRI Regional IV untuk melaju ke tingkat nasional di Semarang. Mereka menjuarai KRI yang diikuti 68 tim dari 25 perguruan tinggi negeri dan swasta se-Jawa Timur.
Lima jenis kompetisi dalam KRI 2013 adalah KRI, Kontes Robot Pemadam Api Indonesia (KRPAI, divisi robot beroda dan robot berkaki), Kontes Robot Seni Indonesia (KRSI), dan Kontes Robot Sepak Bola Indonesia (KRSBI) atau Humanoid.
Tahun ini, PENS mengikuti semua divisi dengan menurunkan lima tim robotnya, yakni ERSION, EILERO, EFFIRO, EROS, dan ERISA. Seleksi KRPAI divisi beroda menyaring tiga wakil dari Regional 4 yaitu Arus (Universitas Dr. Soetomo), EFFIRO (PENS), dan Al-Jazari (ITS).
Di divisi berkaki, dipilihlah EILERO (PENS) di peringkat pertama, lalu Ulil Albab (Polinema) dan terakhir Child13Sh (Unmuh Malang).
Untuk divisi berkaki, skor ditentukan melalui jarak tempuh dan banyak ruangan yang dilaluinya. Poin tambahan akan diperoleh jika robot mampu memadamkan api.
Pada divisi KRSI, enam robot berlenggok menarikan tarian Hanoman Duta. Robot V-Nara, IBRAHIMI, eSPe'04, SUGRIWA, KETEUS, dan ERISA. Akhirnya, terpilihlah ERISA, V-Nara dan eSPe'04 di peringkat 1-3 yang berlaga di KRI Nasional.
Untuk final KRSBI, EROS (PENS) bertemu dengan Ichiro (ITS). Dalam pertandingan yang terbagi dalam dua babak ini, EROS berhasil memenangkan pertandingan dengan skor 10-0.
Hingga kini, seleksi telah terlaksana di 2 regional, yaitu regional 1 (Sumatera) dan regional 4 (Jawa Timur). Masih ada tiga seleksi lagi yakni seleksi regional 2 (Jakarta dan Jabar), regional 3 (Jawa Tengah) dan regional 5 (Indonesia Timur).
 Surabaya (Antara Jatim) - Tim robot "ERSION" dari Politeknik Elektronika Negeri Surabaya (PENS) akhirnya menjuarai Kontes Robot Indonesia (KRI) 2013 Regional IV di GOR Bima Universitas Negeri Surabaya, Sabtu malam.
"Prestasi itu diraih Tim PENS setelah mampu mengalahkan tim robot 'RI-Vet' dari ITS saat bertemu dalam babak final KRI 2013. Sebelumnya, mereka mengikuti babak semifinal bersama Miracle SWC-8, dan New Rengganis," kata Kepala Humas PENS Andri Suryandari.
Pertandingan semifinal pertama antara RI-Vet asal ITS melawan Miracle SWC-8 asal STMIK Surabaya membawa sukses tim RI-Vet dengan pencapaian Green Planet, namun tim dari STMIK Surabaya tidak kecewa, karena ketujuh "leaves" mampu menempati "hole" secara tepat.
Dalam pertandingan semifinal kedua antara New Rengganis dari Unesa dengan ERSION dari PENS juga mengundang antusiasme penonton, karena unjuk kebolehan ERSION dalam "duet spesial" antara robot manual dan automatic mencapai "The Green Planet" sebelum waktu selesai.
Hasil itu menandai "All Final's ITS" terulang untuk ke sekian kalinya pada Final KRI Regional IV dengan keunggulan PENS atas ITS secara "green planet", sedangkan juara ketiga diraih tim Miracle-SWC 08 dari STIMIK Surabaya.
Untuk juara ke 1, 2 dan 3 akan mewakili KRI Regional IV untuk melaju ke tingkat nasional di Semarang. Mereka menjuarai KRI yang diikuti 68 tim dari 25 perguruan tinggi negeri dan swasta se-Jawa Timur.
Lima jenis kompetisi dalam KRI 2013 adalah KRI, Kontes Robot Pemadam Api Indonesia (KRPAI, divisi robot beroda dan robot berkaki), Kontes Robot Seni Indonesia (KRSI), dan Kontes Robot Sepak Bola Indonesia (KRSBI) atau Humanoid.
Tahun ini, PENS mengikuti semua divisi dengan menurunkan lima tim robotnya, yakni ERSION, EILERO, EFFIRO, EROS, dan ERISA. Seleksi KRPAI divisi beroda menyaring tiga wakil dari Regional 4 yaitu Arus (Universitas Dr. Soetomo), EFFIRO (PENS), dan Al-Jazari (ITS).
Di divisi berkaki, dipilihlah EILERO (PENS) di peringkat pertama, lalu Ulil Albab (Polinema) dan terakhir Child13Sh (Unmuh Malang).
Untuk divisi berkaki, skor ditentukan melalui jarak tempuh dan banyak ruangan yang dilaluinya. Poin tambahan akan diperoleh jika robot mampu memadamkan api.
Pada divisi KRSI, enam robot berlenggok menarikan tarian Hanoman Duta. Robot V-Nara, IBRAHIMI, eSPe'04, SUGRIWA, KETEUS, dan ERISA. Akhirnya, terpilihlah ERISA, V-Nara dan eSPe'04 di peringkat 1-3 yang berlaga di KRI Nasional.
Untuk final KRSBI, EROS (PENS) bertemu dengan Ichiro (ITS). Dalam pertandingan yang terbagi dalam dua babak ini, EROS berhasil memenangkan pertandingan dengan skor 10-0.
Hingga kini, seleksi telah terlaksana di 2 regional, yaitu regional 1 (Sumatera) dan regional 4 (Jawa Timur). Masih ada tiga seleksi lagi yakni seleksi regional 2 (Jakarta dan Jabar), regional 3 (Jawa Tengah) dan regional 5 (Indonesia Timur).
Surabaya (Antara Jatim) - Tim robot "ERSION" dari Politeknik Elektronika Negeri Surabaya (PENS) akhirnya menjuarai Kontes Robot Indonesia (KRI) 2013 Regional IV di GOR Bima Universitas Negeri Surabaya, Sabtu malam.
"Prestasi itu diraih Tim PENS setelah mampu mengalahkan tim robot 'RI-Vet' dari ITS saat bertemu dalam babak final KRI 2013. Sebelumnya, mereka mengikuti babak semifinal bersama Miracle SWC-8, dan New Rengganis," kata Kepala Humas PENS Andri Suryandari.
Pertandingan semifinal pertama antara RI-Vet asal ITS melawan Miracle SWC-8 asal STMIK Surabaya membawa sukses tim RI-Vet dengan pencapaian Green Planet, namun tim dari STMIK Surabaya tidak kecewa, karena ketujuh "leaves" mampu menempati "hole" secara tepat.
Dalam pertandingan semifinal kedua antara New Rengganis dari Unesa dengan ERSION dari PENS juga mengundang antusiasme penonton, karena unjuk kebolehan ERSION dalam "duet spesial" antara robot manual dan automatic mencapai "The Green Planet" sebelum waktu selesai.
Hasil itu menandai "All Final's ITS" terulang untuk ke sekian kalinya pada Final KRI Regional IV dengan keunggulan PENS atas ITS secara "green planet", sedangkan juara ketiga diraih tim Miracle-SWC 08 dari STIMIK Surabaya.
Untuk juara ke 1, 2 dan 3 akan mewakili KRI Regional IV untuk melaju ke tingkat nasional di Semarang. Mereka menjuarai KRI yang diikuti 68 tim dari 25 perguruan tinggi negeri dan swasta se-Jawa Timur.
Lima jenis kompetisi dalam KRI 2013 adalah KRI, Kontes Robot Pemadam Api Indonesia (KRPAI, divisi robot beroda dan robot berkaki), Kontes Robot Seni Indonesia (KRSI), dan Kontes Robot Sepak Bola Indonesia (KRSBI) atau Humanoid.
Tahun ini, PENS mengikuti semua divisi dengan menurunkan lima tim robotnya, yakni ERSION, EILERO, EFFIRO, EROS, dan ERISA. Seleksi KRPAI divisi beroda menyaring tiga wakil dari Regional 4 yaitu Arus (Universitas Dr. Soetomo), EFFIRO (PENS), dan Al-Jazari (ITS).
Di divisi berkaki, dipilihlah EILERO (PENS) di peringkat pertama, lalu Ulil Albab (Polinema) dan terakhir Child13Sh (Unmuh Malang).
Untuk divisi berkaki, skor ditentukan melalui jarak tempuh dan banyak ruangan yang dilaluinya. Poin tambahan akan diperoleh jika robot mampu memadamkan api.
Pada divisi KRSI, enam robot berlenggok menarikan tarian Hanoman Duta. Robot V-Nara, IBRAHIMI, eSPe'04, SUGRIWA, KETEUS, dan ERISA. Akhirnya, terpilihlah ERISA, V-Nara dan eSPe'04 di peringkat 1-3 yang berlaga di KRI Nasional.
Untuk final KRSBI, EROS (PENS) bertemu dengan Ichiro (ITS). Dalam pertandingan yang terbagi dalam dua babak ini, EROS berhasil memenangkan pertandingan dengan skor 10-0.
Hingga kini, seleksi telah terlaksana di 2 regional, yaitu regional 1 (Sumatera) dan regional 4 (Jawa Timur). Masih ada tiga seleksi lagi yakni seleksi regional 2 (Jakarta dan Jabar), regional 3 (Jawa Tengah) dan regional 5 (Indonesia Timur).Sistem Kontrol Tombol Pada Kuis
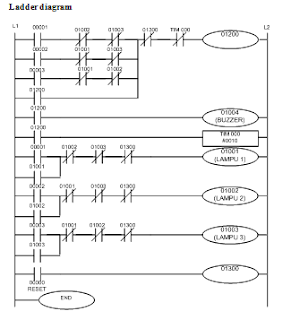
Dalam aplikasi ini digunakan untuk membaca input yang dimasukkan oleh pemain dan di keluarkan dalam bentuk bunyi buzzer dan nyala lampu.


 Penjelasan :
Dari diagram diatas terlihat bahwa setelah salah satu peserta menekan tombol di depannya (PB1, PB2, PB3) maka buzzer akan berbunyi selama 10 detik (tim 000) dan secara otomatis lampu indikator penekannya (L1, L2, L3) akan terus menyala sampai pembawa acara menekan tombol reset. Situasi ini terjadi apabila dalam satu saat hanya salah satu peserta saja yang menekan tombol. Jika terjadi situasi para peserta menekan tombol secara bersamaan maka buzzer dan lampu indikator tidak akan menyala(misal PB1 dan PB2 di tekan bersamaan maka kontaktor PB1dan PB2 NC sehingga ke dua lampu indikator tidak akan menyala)
Penjelasan :
Dari diagram diatas terlihat bahwa setelah salah satu peserta menekan tombol di depannya (PB1, PB2, PB3) maka buzzer akan berbunyi selama 10 detik (tim 000) dan secara otomatis lampu indikator penekannya (L1, L2, L3) akan terus menyala sampai pembawa acara menekan tombol reset. Situasi ini terjadi apabila dalam satu saat hanya salah satu peserta saja yang menekan tombol. Jika terjadi situasi para peserta menekan tombol secara bersamaan maka buzzer dan lampu indikator tidak akan menyala(misal PB1 dan PB2 di tekan bersamaan maka kontaktor PB1dan PB2 NC sehingga ke dua lampu indikator tidak akan menyala)


 Penjelasan :
Dari diagram diatas terlihat bahwa setelah salah satu peserta menekan tombol di depannya (PB1, PB2, PB3) maka buzzer akan berbunyi selama 10 detik (tim 000) dan secara otomatis lampu indikator penekannya (L1, L2, L3) akan terus menyala sampai pembawa acara menekan tombol reset. Situasi ini terjadi apabila dalam satu saat hanya salah satu peserta saja yang menekan tombol. Jika terjadi situasi para peserta menekan tombol secara bersamaan maka buzzer dan lampu indikator tidak akan menyala(misal PB1 dan PB2 di tekan bersamaan maka kontaktor PB1dan PB2 NC sehingga ke dua lampu indikator tidak akan menyala)
Penjelasan :
Dari diagram diatas terlihat bahwa setelah salah satu peserta menekan tombol di depannya (PB1, PB2, PB3) maka buzzer akan berbunyi selama 10 detik (tim 000) dan secara otomatis lampu indikator penekannya (L1, L2, L3) akan terus menyala sampai pembawa acara menekan tombol reset. Situasi ini terjadi apabila dalam satu saat hanya salah satu peserta saja yang menekan tombol. Jika terjadi situasi para peserta menekan tombol secara bersamaan maka buzzer dan lampu indikator tidak akan menyala(misal PB1 dan PB2 di tekan bersamaan maka kontaktor PB1dan PB2 NC sehingga ke dua lampu indikator tidak akan menyala)
Kontrol pintu garasi Otomatis dengan Ultrasonic Switch
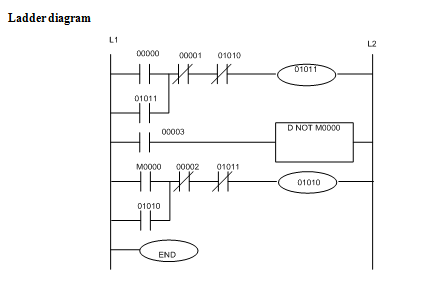
Dalam aplikasi ini digunakan untuk membuka dan menutup pintu garasi secara otomatis dengan menggunakan sensor ultrasonic sebagai pendeteksi.


 Penjelasan :
Berdasarkan diagram ladder diatas, terlihat bahwa ketika kehadiran sebuah mobil atau kendaraan terdeteksi maka sensor (switch) ultrasonic ini akan aktif (00000 on). Hal ini menyebabkan pintu garasi akan mulai membuka (motor pembuka pintu :01011 on), motor akan tetap bekerja sampai pintu mencapai batas atas (limit switch atas aktif). Pintu garasi akan mulai menutup (motor penutup pintu : 01010) jika seluruh badan mobil telah terdeteksi masuk pada garasi tersebut (fungsi D NOT).
Penjelasan :
Berdasarkan diagram ladder diatas, terlihat bahwa ketika kehadiran sebuah mobil atau kendaraan terdeteksi maka sensor (switch) ultrasonic ini akan aktif (00000 on). Hal ini menyebabkan pintu garasi akan mulai membuka (motor pembuka pintu :01011 on), motor akan tetap bekerja sampai pintu mencapai batas atas (limit switch atas aktif). Pintu garasi akan mulai menutup (motor penutup pintu : 01010) jika seluruh badan mobil telah terdeteksi masuk pada garasi tersebut (fungsi D NOT).


 Penjelasan :
Berdasarkan diagram ladder diatas, terlihat bahwa ketika kehadiran sebuah mobil atau kendaraan terdeteksi maka sensor (switch) ultrasonic ini akan aktif (00000 on). Hal ini menyebabkan pintu garasi akan mulai membuka (motor pembuka pintu :01011 on), motor akan tetap bekerja sampai pintu mencapai batas atas (limit switch atas aktif). Pintu garasi akan mulai menutup (motor penutup pintu : 01010) jika seluruh badan mobil telah terdeteksi masuk pada garasi tersebut (fungsi D NOT).
Penjelasan :
Berdasarkan diagram ladder diatas, terlihat bahwa ketika kehadiran sebuah mobil atau kendaraan terdeteksi maka sensor (switch) ultrasonic ini akan aktif (00000 on). Hal ini menyebabkan pintu garasi akan mulai membuka (motor pembuka pintu :01011 on), motor akan tetap bekerja sampai pintu mencapai batas atas (limit switch atas aktif). Pintu garasi akan mulai menutup (motor penutup pintu : 01010) jika seluruh badan mobil telah terdeteksi masuk pada garasi tersebut (fungsi D NOT).
line follower berbasis PID

Robot line follower berbasis PID menggunakan LED dan Photo Diode sebagai sensornya untuk mendeteksi jalur yang
telah dibuat. Cara supaya robot dapat mendeteksi jalur yang dibuat adalah
dengan memposisikan robot pada jalur, yang diusahakan posisi jalur hitam berada
di tengah-tengah sensor Proportional.
Sensor Photodioda adalah salah satu
jenis sensor peka cahaya. Photodiode akan mengalirkan arus yang membentuk
fungsi linear terhadap intensitas cahaya yang diterima. Hubungan antara
keluaran sensor photodiode dengan intensitas cahaya yang diterimanya ketika
dipanjar mundur adalah membentuk suatu fungsi linear.
Pada rancangan sensor
photodiode di bawah, nilai resistansinya akan berkurang bila terkena cahaya dan
bekerja pada kondisi reverse bias. Untuk pemberian pantulan cahayanya LED
merah, komponen ini mempunyai cahaya yang terang dan tidak menyebar, sehingga
membuat pantulan cahaya ke photodiode cukup.
Sensor photodiode tidak terkena
cahaya
Saat photodiode tidak
terkena cahaya, maka nilai resistansinya akan besar atau dapat diasumsikan tak
hingga, sehingga tidak ada arus bocor yang mengalir menuju komparator.
Sensor photodiode terkena cahaya
Saat photodiode terkena cahaya,
maka photodiode akan bersifat sebagai sumber tegangan dan nilai resistansinya
akan menjadi kecil, sehingga aka nada arus bocor yang mengalir ke komparator.
Kontrol
motor pada robot line follower ini dirancang dengan menggunakan kontrol PID.
Dimana kontrol yang digunakan adalah kontrol Proportional dan kontrol Derivatif
saja pada saat robot bekerja. Nilai P disini merupakan respon langsung terhadap
nilai error, sedangkan nilai D adalah laju perubahan nilai error pada setiap
pengambilan sampling atau pengambilan data, dan dalam mengontrol sesuatu yang
membutuhkan respon yag cepat dan tiba-tiba, kontrol yang paling ideal disini
adalah kontrol P dan D. dalam hal ini kontrol integral tidak digunakan pada
saat robot bekerja, sebab nilai I hanya akan menimbulkan osilasi pada motor.
Selain itu, nilai pada program dari pengaturan kontrol PID di atas akan
disimpan di dalam EEPROM (Electrically
Erasable Programmable Read-Only Memory).
- Kontrol PID
Sistem kontrol PID merupakan suatu
sistem untuk menentukan presisi suatu sistem instrumentasi dengan karakteristik
adanya umpan balik dari sistem tersebut. Komponen kontrol PID ini terdiri dari
3 jenis yaitu, proportional, integrative dan derivative. Kontrol yang digunakan
pada rancangan robot ini adalah kontrol proportional dan kontrol derivative.
Kontrol
Proportional – Derivatif
Pengontrol derivatif member respons
terhadap sinyal-sinyal error yang berubah terhadap waktu, tetapi tidak terhadap
sinyal-sinyal error konstan. Karena untuk sinyal-sinyal konstan, laju perubahan
error terhadap waktu adalah sama dengan
nol. Berdasar alas an ini, kontrol derivatif D dikombinasikan dengan kontrol proposional
P sehingga:
|
Keluaran pengontrol
PD=Kp x error + KD xlaju perubahan error terhadap
waktu
|
|
Waktu
|
|
0
|
|
Waktu
|
|
0
|
Gambar
4 Kontrol PD
(Sumber: W.Bolton, 2006)
Gambar 4 menunjukkan bagaimana,
dengan kontrol proposional plus derivatif, keluaran pengontrol dapat berubah
ketika terdapat suatu error yang berubah secara konstan. Tampak bahwa terjadi
perubahan mula-mula yang cepat pada keluaran pengontrol sebagai akibat dari
aksi derivatif yang diikuti oleh perubahan bertahap karena aksi proposional.
Dengan demikian bentuk kontrol ini merespon dengan lebih baik terhadap
perubahan proses yang terjadi secara cepat jika dibandingkan dengan hanya
kontrol proposional. Namun demikian, sebagaimana halnya kontrol proposional,
kontrol ini memerlukan error keadaan tunak untuk mengatasi perubahan konstan
pada kondisi masukan atau perubahan nilai pengaturan.
Persamaan untuk kontrol PD di atas
dapat dituliskan dalam bentuk persamaan berikut:
|
Keluaran
pengontrol PD = Kp (error + TD x laju perubahan error)
|
Kontrol PD dapat menangani
perubahan-perubahan proses yang cepat secara lebih baik dibandingkan dengan
kontrol P saka. Kontrol ini tetap memerlukan error keadaan tunak untuk
mengatasi perubahan konstan pada kondisi-kondisi masukan atau perubahan pada
nilai yan ditetapkan.
Gambar
5 Karakteristik sinyal error
(Sumber: W.Bolton, 2006)
Kondisi ideal pada robot adalah
bergerak maju lurus mengikuti garis, dengan kata lain PV = 0 (nilai sensor =
00011000). Dari sini dapat diasumsikan bahwa Set Point (SP) / kondisi ideal
adalah saat SP = 0. Nilai sensor yang dibaca oleh sensor disebut Process
Variable (PV) / nilai aktual pembacaan. Menyimpangnya posisi robot dari
garis disebut sebagai bobot (b), yang didapat dari b = SP – PV. Dengan
mengetahui besar bobot, mikrokontroller dapat memberikan nilai PWM motor kiri
dan kanan yang sesuai agar dapat menuju ke posisi ideal (SP = 0). Besarnya
nilai PWM ini dapat diperoleh dengan menggunakan kontrol Proporsional (P),
dimana P = bobot * Kp (Kp adalah konstanta proporsional yang nilainya di
set sendiri dari hasil tuning).
Kontrol D digunakan untuk
mengukur seberapa cepat robot bergerak dari kiri ke kanan atau dari kanan ke
kiri. Semakin cepat bergerak dari satu sisi ke sisi lainnya, maka semakin besar
nilai D. Konstanta D (Kd) digunakan untuk menambah atau mengurangi imbas dari
derivatif. Dengan mendapatkan nilai Kd yang tepat pergerakan sisi ke sisi yang
bergelombang akibat dari kontrol proporsional bisa diminimalisasi. Nilai D
didapat dari D = Kd * diff. Dalam program nilai error (SP – PV) saat itu
menjadi nilai bobot_lalu, sehingga diff didapat dari bobot –
bobot_lalu.


 " />
" />
 " />
" />
 " />
" />








